
cooperation; last updated: November 2, 2004
   credits to: Prof. Dario Floreano, Jean-Christophe Zufferey; Yannick Fournier Autonomous Systems Laboratory (http://asl.epfl.ch), Institute of Systems Engineering, Swiss Federal Institute of Technology (EPFL), Lausanne, Switzerland - supported by University of Art and Design Zurich, HGKZ |
 engineer: Yannick Fourier  |
Evolution Applied to Physical Flying Robots: the Blimp Evolving aerial
robots brings a new set of challenges. The major issues of developing
(evolving, e.g. using goevo) a control system for an airship, with
respect to a wheeled robot, are (1) the extension to three dimensions,
(2) the impossibility to communicate to a computer via cables, (3)
the difficulty of defining and measuring performance, and (4) the
more complex dynamics. For example, while the Khepera is controlled
in speed, the blimp is controlled in thrust (speed derivative) and
can slip sideways. Moreover, inertial and aerodynamic forces play
a major role. Artificial evolution is a promising method to automatically
develop control systems for complex robots, but it requires machines
that are capable of moving for long periods of time without human
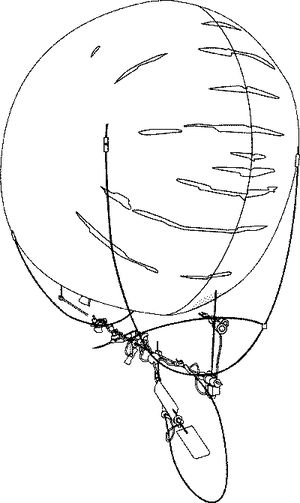
intervention and withstanding shocks. Those requirements led us to
the development of the Blimp 2 shown in the pictures. All onboard
electronic components are connected to a microcontroller with a wireless
connection to a desktop computer. The bidirectional digital communication
with the desktop computer is handled by a Bluetooth radio module,
allowing more than 15 m range. The energy is provided by a Li-Poly
battery, which lasts more than 3 hours under normal operation, during
evolutionary runs with goevo. For now, a simple linear camera is attached
in front of the gondola, pointing forward. We are currently working
on other kinds of micro-cameras. Other embedded sensors are an anemometer
for fitness evaluation, a MEMS gyro for yaw rotation speed estimate,
and a distance sensors for altitude measurements. http://asl.epfl.ch/?content=research/projects/ AdaptiveVisionbasedFlyingRobots/  |
 |
|
 |
|
|